JMRI allows you to use a RailDriver from P.I. Engineering as a Hardware Throttle to run Locomotives with your DCC system.
First, connect your computer to your DCC system and make sure that the regular JMRI Throttles are working fine (Unless you do this first, debugging possible problems connecting the RailDriver is very difficult.)
Next, plug the RailDriver into a USB port on your computer while your JMRI application (PanelPro or DecoderPro) isn't running.
sudo gedit /etc/udev/rules.d/99-myhid.rules
Make the content of this file as below (using your own discovered hex values for idVendor and idProduct): (note: RailDriver: 0x05F3 / 0x00D2)
# My HID device
ATTRS{idProduct}=="00D2", ATTRS{idVendor}=="05F3", MODE="0660", GROUP="plugdev"
Save and exit from root, then unplug and replug your device. The rules should take effect immediately. If they're still not running it may that you're not a member of the plugdev group. You can fix this as follows (assuming that plugdev is not present on your system):
sudo addgroup plugdev
sudo addgroup yourusername plugdev
Once connected, start the JMRI program and select "RailDriver Throttle" from the Debug menu (It's temporarily located there while we develop the support).
A Throttle window titled "RailDriver" should open:
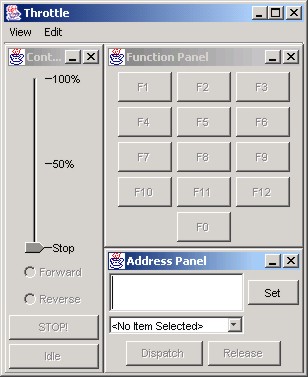
Type the DCC address of your Locomotive into the address box, just like a regular JMRI Throttle, and click "Set". This connects both the Throttle window and the RailDriver console through the DCC system to the decoder. You should now be able to operate the Locomotive from the RailDriver.
Eventually, we'd like to make a more detailed simulation available by connecting the rest of the controls, and adding a detailed model of the trains braking and acceleration.
For technical information on Raildriver, please see the Details Help page.